Magnetic Potential Energy Lab
(Using physical measurements in order to derive a potential energy function)
Purpose: The main goal here is to utilize integration calculus in order to acquire an equation which represents magnetic potential energy, and then to use that equation to verify that this system's energy is conserved.
Procedure: We used an air track with a magnet attached to the air cart, and another magnet at the end of the track. Increasing the angle (theta) between the air track and the horizontal, we can record varying values of the separate distance between magnets (r) caused by the magnets' repulsion of one another. This also enables us to calculate the magnetic force at varying angles, as this force is equal to mgsin(theta), the force of gravity acting on the air-cart. The pre-tilted apparatus is shown:

(Apparatus pre-tilt)
Values which we measured are given in the table below:

(Measured Data)
Using Newton's Laws, we can also derive how to calculate the magnetic force being applied to the air-cart.

(Magnetic force calculation)
Using this relationship, we can calculate the magnetic force at the previously recorded angles.

(Calculated Magnetic Force)
We can plot these force values against the previously recorded separation distance to form a F vs. r graph. Using Logger Pro, we can do a curved fit of this data in order to find a function of Force as a function of r in the form of a power law. This Logger Pro graph is shown below.

(F vs. r)
The power law relationship is in the form of:
F = Ar^n
From our Logger Pro curved fit data box, we can see that:
A = 0.001304
n = -1.506
Now that we've got values, we can integrate from infinity to r to obtain U(r), a function for magnetic potential energy. This is demonstrated below:

(Magnetic Potential Energy Derivation)
We're almost ready to actually start the experiment!!!
We can input the above derived function U(r) into a new calculated column for Magnetic Potential Energy (in Logger Pro). Once that is set up, we leveled out the track once more (no inclination). We then began to record data via the set up Motion Sensor, all while collecting data (via calculated columns in Logger Pro) for KE, PE, and Total Energy of the system as a function of time! This is shown below:
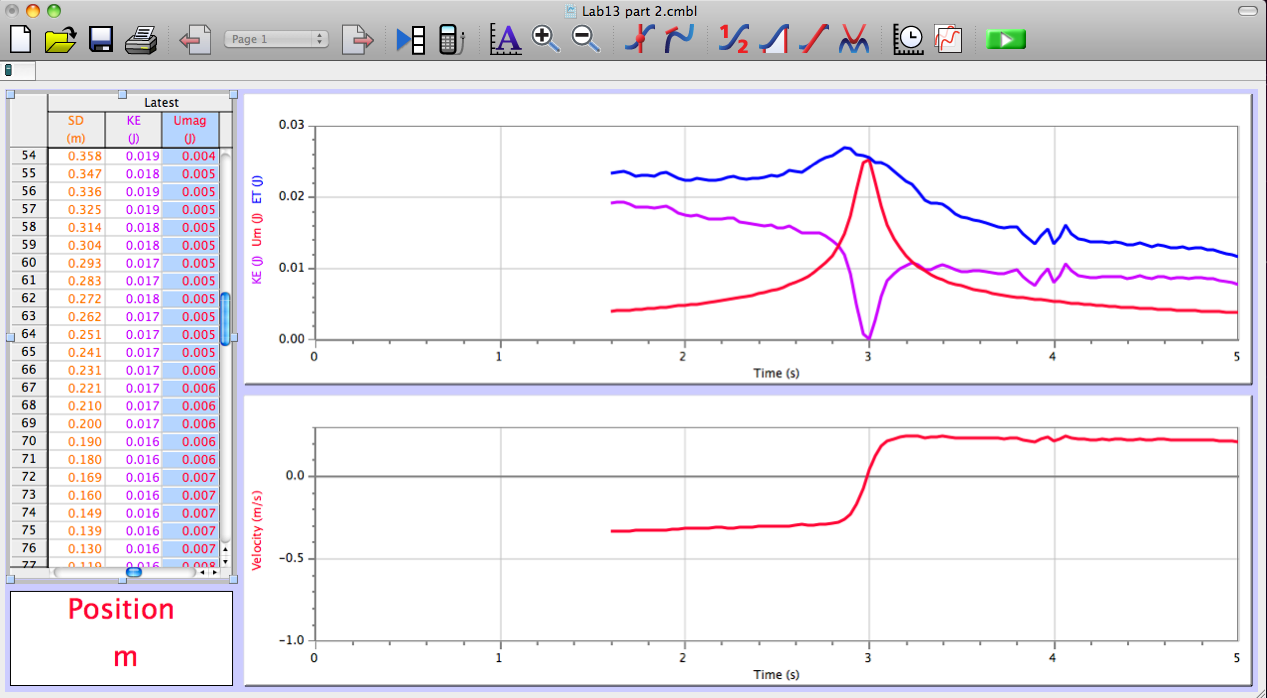
(Final Graph displaying, graphically, conservation of energy within the system)
Conclusion: Graphically, things worked out quite pleasingly. Using all of the data gathered, we could verify that energy was conserved within this system. Using:
Energy(initial) = Energy(final)
KE = U(magnetic)
Sources of uncertainty in this lab include: Improperly leveled air-track, error in measuring distance (r), not calibrating phone app prior to recording angles.



















